مقدمهای بر محصولات موتور جریان مستقیم بدون جاروبک (BLDC) و تحلیل سناریوهای کاربردی
I. مقدمهای بر موتور جریان مستقیم بدون جاروبک (BLDC)
موتور جریان مستقیم بدون جاروبک (BLDC) نوعی موتور جریان مستقیم است که از تماسدهندههای مکانیکی جهت جابجایی جریان (جاروبکهای کربنی) استفاده نمیکند. در عوض، از یک کنترلر الکترونیکی برای انجام جابجایی جریان بهره میبرد و جایگزینی برای موتور جریان مستقیم سنتی با جاروبک محسوب میشود.
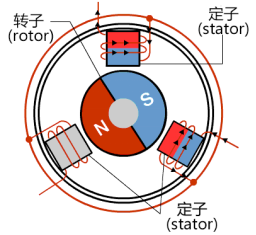
همانند این موتور، موتور پایهای «جریان مستقیم (موتور با جاروبک)» نیز وجود دارد. در این موتور، یک سیمپیچ درون یک میدان مغناطیسی قرار دارد. هنگامی که جریان الکتریکی از سیمپیچ عبور میکند، سیمپیچ توسط یک قطب مغناطیسی دفع و توسط قطب دیگر جذب میشود و در نتیجه تحت این تأثیر، چرخش پیوستهای ایجاد میشود. در طول چرخش، جهت جریان عبوری از سیمپیچ معکوس میشود تا چرخش آن ادامه یابد.
در موتور جریان مستقیم (موتور با جاروبک)، میدان مغناطیسی ایجادشده توسط آهنرباهای دائمی ثابت، ساکن است. چرخش با کنترل میدان مغناطیسی تولیدشده توسط سیمپیچ (روتور) درون آن حاصل میشود. سرعت چرخش با تغییر ولتاژ تنظیم میشود. در موتورهای جریان مستقیم بدون جاروبک (BLDC)، روتور از آهنرباهای دائمی تشکیل شده است. چرخش با تغییر جهت میدان مغناطیسی ایجادشده توسط سیمپیچهای اطراف بهدست میآید. چرخش روتور با تنظیم جهت و بزرگی جریان عبوری از سیمپیچها کنترل میشود.
موتورهای جریان مستقیم بدون جاروبک (BLDC) در سه پیکربندی تکفاز، دو فاز و سهفاز وجود دارند. از میان این پیکربندیها، موتور BLDC سهفاز رایجترین نوع است. عموماً موتورهای بدون جاروبک تکفاز و سهفاز در لوازم برقی روزمره بهطور گستردهای استفاده میشوند. اصل اساسی این دو پیکربندی یکسان است، اما روشهای کنترل آنها کمی متفاوت است.
در یک موتور بیجرقه تکفاز، تمام سیمپیچهای داخلی با یک سیم انجام میشوند. جهت جریان در سیمپیچها متفاوت است. با تغییر جهت جریان در موقعیتها و زمانهای مناسب، کنترل چرخش موتور قابل دستیابی است. روش کنترل برای این پیکربندی نسبتاً ساده است و به همین دلیل در کاربردهایی مانند فنهای رادیاتور بهطور گستردهای استفاده میشود.
برخلاف ساختار تکفاز، سیمپیچهای داخلی یک موتور بیجرقه سهفاز به سه گروه تقسیم میشوند. ظاهری این سیمپیچها بهصورت سه مجموعه مستقل از سیمپیچها به نظر میرسد، اما در داخل با یکدیگر اتصال دارند. این پیکربندی موتور در مقایسه با ساختار تکفاز، مزایایی در کنترل سرعت و کاهش کلی سطح نویز ارائه میدهد و در نتیجه طیف وسیعتری از کاربردها را در بر میگیرد.

II. ویژگیهای موتورهای بیجرقه
1. قابلیت جایگزینی روشهای تنظیم سرعت موتور جریان مستقیم، تنظیم سرعت موتور اینورتری + فرکانس متغیر، و تنظیم سرعت موتور القایی + کاهنده ;
2. مزایای موتورهای جریان مستقیم سنتی را حفظ میکند، در عین حال ساختار جاروبکها و حلقههای لغزشی را حذف مینماید ;
3. توانایی کار در سرعت پایین و توان بالا را دارد و میتواند بارهای سنگین را مستقیماً بدون نیاز به کاهنده حرکت دهد ;
4اندازه کوچک، وزن سبک و توان خروجی بالا؛
5ویژگیهای گشتاور عالی، عملکرد خوب گشتاور در محدوده سرعت میانی و پایین، گشتاور استارت بالا و جریان استارت پایین؛
6. تنظیم پیوسته سرعت، محدوده وسیع سرعت و ظرفیت عالی تحمل بار اضافی ;
7. استارت و توقف نرم، ویژگیهای ترمز عالی و امکان حذف دستگاههای ترمز مکانیکی یا الکترومغناطیسی اصلی ;
8. بهرهوری بالا: خود موتور فاقد تلفات میدان مغناطیسی یا تلفات جاروبک است و مصرف انرژی ناشی از کاهندههای چندمرحلهای را حذف میکند و صرفهجویی جامع انرژی ۲۰ تا ۶۰ درصدی را فراهم میسازد ;
9. قابلیت اطمینان بالا، پایداری خوب، سازگاری قوی و نگهداری و تعمیر آسان؛
10. مقاوم در برابر لرزش و ضربه، سر و صدای پایین، لرزش کم، کارکرد نرم و عمر طولانی ;
11. تولید جرقهای ندارد، بهویژه برای محیطهای انفجاری مناسب است؛ مدلهای ضدانفجار موجود است ;
12. موتورهای با میدان موج ذوزنقهای و موتورهای با میدان موج سینوسی را میتوان بسته به نیازها انتخاب کرد .
III. سناریوهای کاربردی موتورهای بدون جاروبک
کاربردهای بار ثابت
این نوع کاربرد عمدتاً در حوزههایی استفاده میشود که نیازمند سرعت چرخش مشخصی هستند، اما دقت زیادی در مورد آن سرعت مورد نیاز نیست؛ مانند پنکهها، پمپهای آب و خشککنهای مو. چنین کاربردهایی معمولاً هزینهی نسبتاً پایینی دارند و اغلب از کنترل حلقهی باز استفاده میکنند.
کاربردهای بار متغیر
اینها عمدتاً به کاربردهایی اشاره دارند که در آنها سرعت موتور باید در محدودهای مشخص تغییر کند. این کاربردها نیازمند ویژگیهای بالاسرعت و پاسخدهی پویایی بالاتری از موتور هستند. لوازم خانگی مانند ماشینهای ظرفشویی، ماشینهای چرخشی خشککننده و کمپرسورها نمونههای خوبی از این دسته هستند. در صنعت خودروسازی نیز کنترل پمپ روغن، کنترلکنندههای الکترونیکی، کنترل موتور و ابزارهای الکترونیکی نیز از نمونههای برجسته این نوع کاربردها محسوب میشوند. همچنین کاربردهای فراوانی در حوزه هوافضا وجود دارد، از جمله سانتریفیوژها، پمپها، بازوهای رباتیک و ژیروسکوپها. در این حوزه، اغلب از ابزارهای بازخورد موتور برای پیادهسازی کنترل نیمهحلقهباز و حلقهبسته استفاده میشود. این امر ضرورت بهکارگیری الگوریتمهای کنترلی پیچیدهتری را ایجاد کرده و پیچیدگی کنترلکننده و هزینه سیستم را افزایش میدهد.
کاربردهای موقعیتیابی
بیشتر کاربردهای کنترل و اتوماسیون صنعتی در این دستهبندی قرار میگیرند. این کاربردها اغلب شامل انتقال انرژی هستند، مانند چرخدندهها یا نوارهای نقاله. در نتیجه، سیستم نیازمند مشخصات خاصی از نظر پاسخدهی پویای سرعت و گشتاور موتور است. علاوه بر این، این کاربردها ممکن است تغییرات متعددی در جهت چرخش موتور را نیاز داشته باشند. موتور ممکن است در حالتهای شتابگیری، سرعت ثابت یا کاهش سرعت کار کند و بار نیز ممکن است در طول این فازها متغیر باشد. این امر نیازمندیهای بالاتری از کنترلکننده ایجاد میکند.
 اخبار داغ
اخبار داغ2026-06-01
2026-03-24
2026-03-20
2026-03-03
2026-03-02
2026-03-01
کپیرایت © 2025 توسط شرکت فناوری انرژی نو دلیکسی (هانگژو) محدودیت شده - سیاست حفظ حریم خصوصی