Wprowadzenie do produktów BLDC i analiza scenariuszy zastosowania
I. Wprowadzenie do BLDC
Silnik prądu stałego bezszczotkowy (BLDC) to rodzaj silnika prądu stałego, który nie wykorzystuje mechanicznych styków komutacyjnych (szczotek węglowych). Zamiast tego stosuje elektroniczny sterownik do realizacji komutacji, zastępując tradycyjny silnik prądu stałego ze szczotkami.
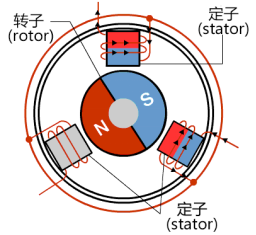
Jego odpowiednikiem jest podstawowy „silnik prądu stałego (silnik ze szczotkami)”. Cewka umieszczona jest w polu magnetycznym. Gdy przez nią przepływa prąd, cewka jest odpychana przez jeden biegun magnetyczny i przyciągana przez drugi, co powoduje jej ciągłą rotację pod wpływem tego zjawiska. Podczas obrotu kierunek przepływu prądu przez cewkę jest odwracany, umożliwiając jej dalsze wirowanie.
W silniku prądu stałego (silniku szczotkowym) pole magnetyczne generowane przez stałe magnesy trwałe jest nieruchome. Obrót osiągany jest poprzez sterowanie polem magnetycznym wytwarzanym przez cewkę (wirnik) umieszczoną w jego wnętrzu. Prędkość obrotową zmienia się poprzez zmianę napięcia. W silniku prądu stałego bezszczotkowym (BLDC) wirnik składa się z magnesów trwałych. Obrót osiągany jest poprzez zmianę kierunku pola magnetycznego generowanego przez otaczające cewki. Obrót wirnika sterowany jest poprzez regulację kierunku i wartości prądu przepływającego przez cewki.
Silniki prądu stałego bezszczotkowe mają trzy konfiguracje: jednofazową, dwufazową i trójfazową. Spośród nich najczęściej stosowanym jest silnik BLDC trójfazowy. Ogólnie rzecz biorąc, silniki bezszczotkowe jednofazowe i trójfazowe są często wykorzystywane w codziennych urządzeniach elektrycznych. Podstawowa zasada działania tych dwóch konfiguracji jest taka sama, lecz metody ich sterowania różnią się nieco.
W jednofazowym silniku bezszczotkowym wszystkie uzwojenia wewnętrzne są wykonane za pomocą pojedynczego przewodu. Kierunek przepływu prądu różni się między poszczególnymi uzwojeniami. Poprzez zmianę kierunku przepływu prądu w odpowiednich położeniach i w odpowiednim czasie można osiągnąć sterowanie obrotami silnika. Metoda sterowania w tym układzie jest stosunkowo prosta, dlatego znajduje ona szerokie zastosowanie m.in. w wentylatorach chłodnic.
W przeciwieństwie do konstrukcji jednofazowej, uzwojenia wewnętrzne trójfazowego silnika bezszczotkowego są podzielone na trzy grupy. Pozornie wyglądają one jak trzy niezależne zestawy uzwojeń, lecz w rzeczywistości są one połączone ze sobą wewnętrznie. W porównaniu z konstrukcją jednofazową ten typ silnika oferuje korzyści w zakresie regulacji prędkości obrotowej oraz ogólnego obniżenia poziomu hałasu, co przekłada się na szerszą gamę zastosowań.

II. Charakterystyka silników bezszczotkowych
1. Może zastąpić regulację prędkości obrotowej silników prądu stałego, regulację prędkości obrotowej przy użyciu falownika i silnika o zmiennej częstotliwości oraz regulację prędkości obrotowej silnika asynchronicznego w połączeniu z reduktorem ;
2. Zachowuje zalety tradycyjnych silników prądu stałego, eliminując jednocześnie konstrukcję szczotek węglowych i pierścieni ślizgowych ;
3. Możliwość pracy przy niskich prędkościach obrotowych i wysokim momencie obrotowym; umożliwia bezpośrednie napędzanie dużych obciążeń bez zastosowania przekładni ;
4małe wymiary, niewielka masa, wysoka moc wyjściowa;
5doskonałe charakterystyki momentu obrotowego, dobra wydajność przy średnich i niskich prędkościach obrotowych, wysoki moment rozruchowy oraz niski prąd rozruchowy;
6. Bezstopniowa regulacja prędkości obrotowej, szeroki zakres prędkości, duża odporność na przeciążenia ;
7. Miękki rozruch/zatrzymanie, dobre właściwości hamowania; umożliwia wyeliminowanie oryginalnych mechanicznych lub elektromagnetycznych urządzeń hamujących ;
8. Wysoka sprawność: sam silnik nie generuje strat wzbudzenia ani strat związanych ze szczotkami węglowymi, eliminuje zużycie energii związane z wielostopniowym zmniejszaniem prędkości obrotowej, co pozwala osiągnąć ogólną oszczędność energii w zakresie 20–60% ;
9. Wysoka niezawodność, dobra stabilność, duża odporność na zmienne warunki eksploatacyjne, prosta obsługa i konserwacja;
10. Odporność na wibracje i uderzenia, niski poziom hałasu, niskie wibracje, gładka praca, długa żywotność ;
11. Brak iskrożenia, szczególnie odpowiednie dla środowisk wybuchowych; dostępne są modele przeciwwybuchowe ;
12. Można wybrać silniki z polem trapezoidalnym lub sinusoidalnym w zależności od wymagań .
III. Zastosowania silników bezszczotkowych
Zastosowania przy stałym obciążeniu
Ten typ zastosowań wykorzystywany jest głównie w dziedzinach wymagających określonej prędkości obrotowej, ale o niskich wymaganiach co do jej dokładności, np. w wentylatorach, pompach wody i suszarkach do włosów. Takie zastosowania charakteryzują się zwykle niskimi kosztami i często wykorzystują sterowanie otwartopętlowe.
Zastosowania przy zmiennym obciążeniu
Odnoszą się one głównie do zastosowań, w których prędkość silnika musi się zmieniać w określonym zakresie. W takich zastosowaniach stawiane są wyższe wymagania względem charakterystyk wysokoprędkościowych silnika oraz jego dynamicznej odpowiedzi. Dobrymi przykładami są urządzenia gospodarstwa domowego, takie jak pralki, suszarki bębnowe i sprężarki. W przemyśle motocyklowym i samochodowym przykładowymi zastosowaniami są sterowanie pompą oleju, sterowniki elektroniczne, sterowanie silnikiem oraz narzędzia elektroniczne. W dziedzinie lotnictwa i astronautyki występuje również wiele zastosowań, np. wirówki, pompy, ramiona robotów oraz żyroskopy. W tej dziedzinie często stosuje się urządzenia sprzężenia zwrotnego silnika w celu realizacji sterowania półpętlowego i zamkniętej pętli. Jest to powodem konieczności zastosowania skomplikowanych algorytmów sterowania, co zwiększa złożoność sterownika oraz koszt całego systemu.
Zastosowania pozycjonujące
Większość przemysłowych zastosowań sterowania i automatyki wpisuje się w tę kategorię. Zastosowania te często wiążą się z przekazywaniem energii, na przykład za pomocą przekładni lub taśm transportujących. W konsekwencji system stawia określone wymagania dotyczące dynamicznej odpowiedzi prędkości silnika oraz momentu obrotowego. Ponadto w tych zastosowaniach może być wymagana częsta zmiana kierunku obrotów silnika. Silnik może pracować w fazach przyspieszania, ruchu jednostajnego lub hamowania, a obciążenie może również ulegać zmianie w trakcie tych faz. Oznacza to wyższe wymagania stawiane sterownikowi.
 Gorące wiadomości
Gorące wiadomości2026-06-01
2026-03-24
2026-03-20
2026-03-03
2026-03-02
2026-03-01
Prawa autorskie © 2025 przez Delixi New Energy Technology (hangzhou) Co., Ltd. - Polityka prywatności