Introducción a los productos BLDC y análisis de los escenarios de aplicación
I. Introducción a los motores BLDC
Un motor de corriente continua sin escobillas (BLDC) es un tipo de motor de corriente continua que no utiliza contactos mecánicos de conmutación (escobillas de carbón). En su lugar, emplea un controlador electrónico para lograr la conmutación, sustituyendo así al motor de corriente continua tradicional con escobillas.
Su contraparte es el motor de corriente continua básico (motor con escobillas). Una bobina se coloca dentro de un campo magnético. Cuando circula corriente, la bobina es repelida por un polo magnético y atraída por el otro, lo que provoca una rotación continua bajo este efecto. Durante la rotación, se invierte la dirección de la corriente que fluye a través de la bobina, permitiendo que siga girando.
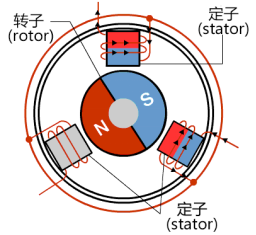
En un motor de corriente continua (motor con escobillas), el campo magnético generado por los imanes permanentes fijos es estacionario. La rotación se logra controlando el campo magnético producido por la bobina (rotor) en su interior. La velocidad de rotación se modifica variando la tensión. En un motor CC sin escobillas (BLDC), el rotor está compuesto por imanes permanentes. La rotación se consigue cambiando la dirección del campo magnético generado por las bobinas circundantes. La rotación del rotor se controla regulando la dirección y la magnitud de la corriente que fluye a través de las bobinas.
Los motores de corriente continua sin escobillas (BLDC) tienen tres configuraciones: monofásica, bifásica y trifásica. De estas, la BLDC trifásica es la más común. En general, los motores sin escobillas monofásicos y trifásicos se utilizan frecuentemente en electrodomésticos de uso cotidiano. El principio subyacente de estas dos configuraciones es el mismo, pero sus métodos de control difieren ligeramente.
En un motor sin escobillas monofásico, todos los devanados internos se realizan mediante un único cable. La dirección de la corriente varía entre los distintos devanados. Al cambiar la dirección de la corriente en posiciones y momentos adecuados, se logra el control de la rotación del motor. El método de control para esta configuración es relativamente sencillo, por lo que se utiliza ampliamente en aplicaciones como los ventiladores de radiador.
A diferencia de la estructura monofásica, los devanados internos de un motor sin escobillas trifásico se dividen en tres grupos. Superficialmente, estos parecen tres conjuntos independientes de devanados, pero internamente están interconectados. En comparación con la estructura monofásica, esta configuración de motor ofrece ventajas en el control de velocidad y en la reducción general del ruido, lo que da lugar a un espectro más amplio de aplicaciones.

II. Características de los motores sin escobillas
1. Puede sustituir la regulación de velocidad de motores de corriente continua, la regulación de velocidad mediante inversor + motor de frecuencia variable, y la regulación de velocidad mediante motor asíncrono + reductor ;
2. Mantiene las ventajas de los motores de corriente continua tradicionales, eliminando al mismo tiempo la estructura de escobillas de carbón y anillos rozantes ;
3. Capaz de operar a baja velocidad y alta potencia; puede accionar cargas grandes directamente sin necesidad de reductor ;
4tamaño reducido, ligero y alta potencia de salida;
5excelentes características de par, buen rendimiento de par a media y baja velocidad, alto par de arranque y baja corriente de arranque;
6. Regulación continua de velocidad, amplio rango de velocidades y elevada capacidad de sobrecarga ;
7. Arranque y parada suaves, buenas características de frenado; puede eliminar la necesidad de dispositivos de frenado mecánicos o electromagnéticos originales ;
8. Alta eficiencia: el motor no presenta pérdidas por excitación ni pérdidas por escobillas de carbón, elimina el consumo asociado a la reducción en múltiples etapas y logra un ahorro energético integral del 20 % al 60 % ;
9. Alta fiabilidad, buena estabilidad, gran adaptabilidad y mantenimiento y reparación sencillos;
10. Resistente a vibraciones y golpes, bajo nivel de ruido, baja vibración, funcionamiento suave y larga vida útil ;
11. Sin generación de chispas, especialmente adecuado para entornos explosivos; disponibles modelos a prueba de explosión ;
12. Se pueden seleccionar motores con campo de onda trapezoidal o motores con campo de onda sinusoidal según los requisitos .
III. Escenarios de aplicación de los motores sin escobillas
Aplicaciones con carga constante
Este tipo de aplicación se utiliza principalmente en campos que requieren una velocidad de rotación determinada, pero con bajos requisitos de precisión respecto a dicha velocidad, como ventiladores, bombas de agua y secadores de pelo. Dichas aplicaciones suelen tener costos relativamente bajos y frecuentemente emplean control en lazo abierto.
Aplicaciones con carga variable
Estas aplicaciones se refieren principalmente a casos en los que la velocidad del motor debe variar dentro de un determinado rango. Dichas aplicaciones exigen mayores prestaciones en cuanto a las características de alta velocidad del motor y su respuesta dinámica. Ejemplos típicos son electrodomésticos como lavadoras, centrifugadoras y compresores. En el sector automotriz, también constituyen excelentes ejemplos el control de bombas de aceite, los controladores electrónicos, el control del motor y las herramientas eléctricas. Asimismo, existen numerosas aplicaciones en el campo aeroespacial, tales como centrífugas, bombas, brazos robóticos y giroscopios. En este ámbito, suelen emplearse dispositivos de retroalimentación del motor para implementar controles semicerrados y cerrados. Esto requiere algoritmos de control complejos, lo que incrementa la complejidad del controlador y el costo del sistema.
Aplicaciones de posicionamiento
La mayoría de las aplicaciones industriales de control y automatización se incluyen en esta categoría. Estas aplicaciones suelen implicar la transmisión de energía, por ejemplo mediante engranajes o cintas transportadoras. En consecuencia, el sistema tiene requisitos específicos respecto a la respuesta dinámica de velocidad y al par del motor. Además, estas aplicaciones pueden requerir cambios frecuentes en el sentido de giro del motor. El motor puede operar en fases de aceleración, velocidad constante o desaceleración, y la carga también puede variar durante dichas fases. Esto impone mayores exigencias al controlador.
 Noticias de actualidad
Noticias de actualidad2026-06-01
2026-03-24
2026-03-20
2026-03-03
2026-03-02
2026-03-01
Derechos de autor © 2025 por Delixi New Energy Technology (hangzhou) Co., Ltd. - Política de privacidad