ການແນະນຳເຖິງຜະລິດຕະພັນ BLDC ແລະ ການວິເຄາະສະຖານະການການນຳໃຊ້
I. ການແນະນຳເຖິງ BLDC
ມໍເຕີໄຟຟ້າ DC ທີ່ບໍ່ມີປຸ່ມ (BLDC) ແມ່ນປະເພດໜຶ່ງຂອງມໍເຕີໄຟຟ້າ DC ທີ່ບໍ່ໃຊ້ຈຸດຕິດຕໍ່ທາງກົກ (ປຸ່ມຖ່ານ) ເພື່ອປ່ຽນທິດທາງການໄຫຼຂອງໄຟຟ້າ. ແທນທີ່ຈະເປັນດັ່ງນັ້ນ, ມັນໃຊ້ຄອນໂທລເລີຣ໌ອີເລັກໂທຣນິກເພື່ອປະຕິບັດການປ່ຽນທິດທາງການໄຫຼຂອງໄຟຟ້າ, ໂດຍການປ່ຽນທີ່ມໍເຕີໄຟຟ້າ DC ພື້ນຖານທີ່ມີປຸ່ມ.
ຄູ່ທີ່ສອດຄ່ອງກັບສິ່ງນີ້ແມ່ນ "ມໍເຕີໄຟຟ້າ DC (ມໍເຕີທີ່ມີປຸ່ມ)" ພື້ນຖານ. ແຕ່ລະຂດລວມ (coil) ຖືກຈັດວາງຢູ່ພາຍໃນສະພາບແວດລ້ອມທີ່ມີທົ່ງແມ່ເຫຼັກ. ເມື່ອໄຟຟ້າໄຫຼຜ່ານ, ຂດລວມຈະຖືກດັນອອກຈາກຂັ້ວແມ່ເຫຼັກໜຶ່ງ ແລະ ດຶງດູດເຂົ້າຫາຂັ້ວແມ່ເຫຼັກອີກອັນໜຶ່ງ, ເຮັດໃຫ້ເກີດການຫມຸນຕໍ່ເນື່ອງເນື່ອງຈາກຜົນກະທົບນີ້. ໃນระหว່າການຫມຸນ, ທິດທາງຂອງໄຟຟ້າທີ່ໄຫຼຜ່ານຂດລວມຈະຖືກປ່ຽນທິດທາງເພື່ອໃຫ້ມັນສາມາດຫມຸນຕໍ່ໄປໄດ້.
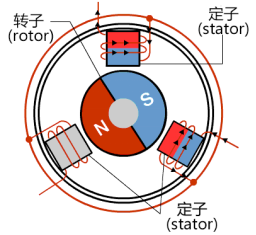
ໃນມໍເຕີ DC (ມໍເຕີທີ່ມີບຣຸດຊ໌), ສະໝາທິສະຫຼາກທີ່ເກີດຈາກແມ່ເຫຼັກຖາວອນທີ່ຢູ່ນິ່ງນີ້ແມ່ນຄົງທີ່. ການຫມູນເກີດຂື້ນດ້ວຍການຄວບຄຸມສະໝາທິສະຫຼາກທີ່ເກີດຈາກຂດລວມ (ໂຣເຕີ) ຢູ່ໃນນີ້. ຄວາມໄວຂອງການຫມູນຈະປ່ຽນແປງໄດ້ດ້ວຍການປ່ຽນແປງຄ່າຄວາມຕ່າງ»ຂອງໄຟຟ້າ. ໃນມໍເຕີ BLDC, ໂຣເຕີປະກອບດ້ວຍແມ່ເຫຼັກຖາວອນ. ການຫມູນເກີດຂື້ນດ້ວຍການປ່ຽນທິດທາງຂອງສະໝາທິສະຫຼາກທີ່ເກີດຈາກຂດລວມທີ່ຢູ່ລ້ອມຮອບ. ການຫມູນຂອງໂຣເຕີຖືກຄວບຄຸມດ້ວຍການປະຕິບັດການຄວບຄຸມທິດທາງ ແລະ ຄ່າຂອງການໄຫຼຜ່ານຂດລວມ.
ມໍເຕີ DC ທີ່ບໍ່ມີບຣຸດຊ໌ມີສາມຮູບແບບ: ເດີ່ມຕົ້ນດ້ວຍເຟດດຽວ, ເຟດສອງ, ແລະ ເຟດສາມ. ໃນຈຳນວນນີ້, ມໍເຕີ BLDC ເຟດສາມແມ່ນທີ່ນິຍົມທີ່ສຸດ. ໂດຍທົ່ວໄປແລ້ວ, ມໍເຕີທີ່ບໍ່ມີບຣຸດຊ໌ເຟດດຽວ ແລະ ເຟດສາມມັກຖືກນຳໃຊ້ຢ່າງກວ້າງຂວາງໃນອຸປະກອນໄຟຟ້າທີ່ໃຊ້ໃນຊີວິດປະຈຳວັນ. ຫຼັກການພື້ນຖານຂອງຮູບແບບທັງສອງນີ້ແມ່ນຄືກັນ, ແຕ່ວິທີການຄວບຄຸມຂອງມັນແຕກຕ່າງກັນເລັກນ້ອຍ.
ໃນມໍເຕີບໍ່ມີແປງ (brushless motor) ແບບເດີ່ມີເຟສດຽວ (single-phase) ແຕ່ລະຂດລວມທັງໝົດພາຍໃນຈະຖືກປະກອບດ້ວຍລວມເດີ່ມີເສັ້ນລວມດຽວ. ທິດທາງຂອງການໄຫຼຜ່ານແຕ່ລະຂດລວມຈະແຕກຕ່າງກັນ. ໂດຍການປ່ຽນທິດທາງຂອງການໄຫຼໃນຕຳແໜ່ງ ແລະ ເວລາທີ່ເໝາະສົມ ສາມາດຄວບຄຸມການຫມຸນຂອງມໍເຕີໄດ້. ວິທີການຄວບຄຸມສຳລັບຮູບແບບນີ້ມີຄວາມງ່າຍດາຍຄ່ອນຂ້າງ, ຈຶ່ງຖືກນຳໃຊ້ຢ່າງກວ້າງຂວາງໃນການນຳໃຊ້ຕ່າງໆເຊັ່ນ: ພັດລະບົບລະບາຍຄວາມຮ້ອນ (radiator fans).
ຕ່າງຈາກຮູບແບບເດີ່ມີເຟສດຽວ (single-phase), ຂດລວມພາຍໃນຂອງມໍເຕີບໍ່ມີແປງ (brushless motor) ແບບເດີ່ມີເຟສສາມ (three-phase) ຈະຖືກແບ່ງອອກເປັນສາມກຸ່ມ. ໃນທີ່ສຳຫຼັບເບື້ອງຕົ້ນ ມັນເບິ່ງຄືວ່າເປັນຂດລວມສາມຊຸດທີ່ເປັນອິດສະຫຼະຕໍ່ກັນ, ແຕ່ພາຍໃນຈະເຊື່ອມຕໍ່ກັນ. ເມື່ອທຽບກັບຮູບແບບເດີ່ມີເຟສດຽວ, ຮູບແບບມໍເຕີນີ້ມີຂໍ້ດີໃນການຄວບຄຸມຄວາມໄວ ແລະ ລົດຊາດເສີຍງທີ່ຕ່ຳລົງໂດຍລວມ, ສົ່ງຜົນໃຫ້ມີການນຳໃຊ້ທີ່ກວ້າງຂວາງຂຶ້ນ.

II. ຄຸນລັກສະນະຂອງມໍເຕີບໍ່ມີແປງ (Brushless Motors)
1. ສາມາດແທນການຄວບຄຸມຄວາມໄວຂອງມໍເຕີ DC, ການຄວບຄຸມຄວາມໄວຂອງມໍເຕີແບບ inverter + variable frequency, ແລະ ການຄວບຄຸມຄວາມໄວຂອງມໍເຕີ asynchronous + reducer ;
2. ຮັກສາຂໍ້ດີຂອງມໍເຕີ DC ດັ້ງເດີມໄວ້ ໃນຂະນະທີ່ກຳຈັດໂຄງສ້າງຂອງຖ່ານຫີນ (carbon brush) ແລະ ວົງແຫວນລື້ນ (slip ring) ອອກ ;
3. ສາມາດເຮັດວຽກໃນຄວາມເລັກນ້ອຍ ແຕ່ມີພະລັງງານສູງ, ສາມາດຂັບເຄື່ອນພາລະບັນທຸກທີ່ໃຫຍ່ໄດ້ໂດຍກົງໂດຍບໍ່ຕ້ອງໃຊ້ເຄື່ອງຫຼຸດຄວາມເລັກນ້ອຍ (reducer) ;
4ຂະໜາດນ້ອຍ, ເບົາ, ແລະ ມີພະລັງງານຜະລິດຕະພັນສູງ;
5ມີລັກສະນະທ້ອງຖິ່ນຂອງທ້ອງຖິ່ນທີ່ດີເລີດ, ມີປະສິດທິພາບດີໃນການສ້າງທ້ອງຖິ່ນໃນຄວາມເລັກນ້ອຍ/ຄວາມເລັກນ້ອຍກາງ, ມີທ້ອງຖິ່ນເລີ່ມຕົ້ນສູງ, ແລະ ມີປະຈຸບັນເລີ່ມຕົ້ນຕ່ຳ;
6. ການປັບຄວາມເລັກນ້ອຍຢ່າງຕໍ່ເນື່ອງ (stepless speed regulation), ຊ່ວງຄວາມເລັກນ້ອຍກວ້າງ, ຄວາມສາມາດໃນການຮັບພາລະເກີນດີເລີດ ;
7. ເລີ່ມຕົ້ນ/ຢຸດຢ່າງນຸ້ມນວນ, ມີລັກສະນະການຫຼຸດຄວາມເລັກນ້ອຍທີ່ດີ, ສາມາດກຳຈັດອຸປະກອນຫຼຸດຄວາມເລັກນ້ອຍທາງກາຍະພາບ ຫຼື ເຄື່ອງຈັກໄຟຟ້າທີ່ມີຢູ່ເດີມອອກໄດ້ ;
8. ມີປະສິດທິພາບສູງ: ມໍເຕີເອງບໍ່ມີການສູນເສຍພະລັງງານຈາກການເຮັດວຽກຂອງຂົວໄຟຟ້າ (excitation loss) ຫຼື ການສູນເສຍຈາກຖ່ານຫີນ (carbon brush loss), ກຳຈັດການສູນເສຍພະລັງງານຈາກການຫຼຸດຄວາມເລັກນ້ອຍຫຼາຍຂັ້ນ, ເຮັດໃຫ້ປະຢັດພະລັງງານທັງໝົດໄດ້ 20%~60% ;
9. ມີຄວາມເຊື່ອຖືໄດ້ສູງ, ມີຄວາມສະຖຽນທີ່ດີ, ມີຄວາມຍືດຫຸ່ນສູງ, ແລະ ງ່າຍຕໍ່ການບໍາຮຸງຮັກສາ ແລະ ຊ່ວຍແກ້ໄຂ;
10. ຕ້ານການສັ່ນສະເທືອນ ແລະ ການຊອກຫາ, ເສຽງດັງຕ່ຳ, ການສັ່ນສະເທືອນຕ່ຳ, ການເຮັດວຽກທີ່ລຽບລ້ອຍ, ແລະ ອາຍຸການໃຊ້ງານຍາວ ;
11. ບໍ່ມີການສ້າງປະຈຸບັນ, ເຫມາະສຳລັບສະຖານທີ່ທີ່ອາດເກີດການລະເບີດໄດ້ຢ່າງເປັນພິເສດ; ມີຮູບແບບທີ່ຕ້ານການລະເບີດໃຫ້ເລືອກ ;
12. ສາມາດເລືອກມໍເຕີທີ່ມີຄວາມຖີ່ຮູບທຣາເປຊອຍດ້ານ (trapezoidal wave) ຫຼື ມໍເຕີທີ່ມີຄວາມຖີ່ຮູບຄື່ນໄຊນູສອຍດ້ານ (sinusoidal wave) ຂຶ້ນກັບຄວາມຕ້ອງການ .
III. ສະຖານະການທີ່ນຳໃຊ້ມໍເຕີບໍ່ມີແບຣັດ (Brushless Motors)
ການນຳໃຊ້ທີ່ມີພາລະບັນທຸກຄົງທີ່
ການນຳໃຊ້ປະເພດນີ້ສ່ວນຫຼາຍໃຊ້ໃນຂະແວງທີ່ຕ້ອງການຄວາມໄວ່ໃນການປະຕິບັດງານທີ່ຄ່ອນຂ້າງຄົງທີ່ ແຕ່ບໍ່ຕ້ອງການຄວາມຖືກຕ້ອງສູງເທື່ອໃນຄວາມໄວ່ດັ່ງກ່າວ ເຊັ່ນ: ພັດลม, ປັ້ມນ້ຳ, ແລະ ເຄື່ອງເປົ່າຜົມ. ການນຳໃຊ້ເຫຼົ່ານີ້ມັກຈະມີຕົ້ນທຶນຄ່ອນຂ້າງຕ່ຳ ແລະ ມັກໃຊ້ການຄວບຄຸມແບບບໍ່ມີລູບວົງ (open-loop control).
ການນຳໃຊ້ທີ່ມີພາລະບັນທຸກປ່ຽນແປງ
ເຫຼົ່ານີ້ເປັນການອ້າງອີງເຖິງ ການນຳໃຊ້ທີ່ຄວາມໄວຂອງມໍເຕີຕ້ອງມີການປ່ຽນແປງພາຍໃນຂອບເຂດໜຶ່ງ. ການນຳໃຊ້ເຫຼົ່ານີ້ມີຄວາມຕ້ອງການສູງກວ່າຕໍ່ລັກສະນະຂອງມໍເຕີໃນການເຄື່ອນທີ່ດ້ວຍຄວາມໄວສູງ ແລະ ຄວາມໄວໃນການຕອບສະຫນອງຕໍ່ການປ່ຽນແປງ. ອຸປະກອນໃນບ້ານເຊັ່ນ: ເຄື່ອງຊັກຜ້າ, ເຄື່ອງບີບນ້ຳ, ແລະ ຕົວອັດລະດັບຄວາມກົດ (compressor) ແມ່ນຕົວຢ່າງທີ່ດີ. ໃນອຸດສາຫະກຳຍານຍົນ, ການຄວບຄຸມປັ້ມນ້ຳມັນ, ອຸປະກອນຄວບຄຸມອີເລັກໂຕຣນິກ, ການຄວບຄຸມເຄື່ອງຈັກ, ແລະ ເຄື່ອງມືອີເລັກໂຕຣນິກກໍເປັນຕົວຢ່າງທີ່ດີເຊັ່ນກັນ. ມີການນຳໃຊ້ອີກຫຼາຍຢ່າງໃນດ້ານອາວະກາດ, ເຊັ່ນ: ເຄື່ອງແຍກດ້ວຍແຮງເຄື່ອນທີ່ (centrifuges), ປັ້ມ, ມືເຮັດວຽກອັດຕະໂນມັດ (robotic arms), ແລະ ເຄື່ອງວັດແທກການເວີນ (gyroscopes). ໃນດ້ານນີ້, ອຸປະກອນສົ່ງຄືນສັນຍານຈາກມໍເຕີ (motor feedback devices) ࡒັກຖືກນຳໃຊ້ເພື່ອປະຕິບັດການຄວບຄຸມແບບເຄື່ອງຈັກ-ເປີດເຄື່ອງຈັກ-ປິດ (semi-open-loop) ແລະ ການຄວບຄຸມແບບປິດວົງຈອນ (closed-loop). ສິ່ງນີ້ເຮັດໃຫ້ຕ້ອງໃຊ້ອັລກົຣິດີມທີ່ສັບສົນໃນການຄວບຄຸມ, ສົ່ງຜົນໃຫ້ຄວາມສັບສົນຂອງຕົວຄວບຄຸມ ແລະ ຕົ້ນທຶນຂອງລະບົບເພີ່ມຂຶ້ນ.
ການນຳໃຊ້ເພື່ອການຈັດຕຳແໜ່ງ
ການນຳໃຊ້ດ້ານການຄວບຄຸມ ແລະ ອັດຕະໂນມັດໃນອຸດສາຫະກຳສ່ວນຫຼາຍຈະຢູ່ໃນປະເພດນີ້. ການນຳໃຊ້ເຫຼົ່ານີ້ມັກຈະກ່ຽວຂ້ອງກັບການຖ່າຍໂອນພະລັງງານ ເຊັ່ນ: ເກີຣ໌ ຫຼື ແຜ່ນພາດທີ່ເຄື່ອນໄຫວ. ດັ່ງນັ້ນ ລະບົບຈຶ່ງມີຄວາມຕ້ອງການເປັນພິເສດຕໍ່ການຕອບສະຫນອງແບບໄວຂອງຄວາມໄວ ແລະ ອະນຸພັກຂອງມໍເຕີ. ນອກຈາກນີ້ ການນຳໃຊ້ເຫຼົ່ານີ້ອາດຈະຕ້ອງການການປ່ຽນທິດທາງຂອງມໍເຕີຢ່າງເລື້ອຍໆ. ມໍເຕີອາດຈະເຮັດວຽກຢູ່ໃນຂະບວນການເລີ່ມເຄື່ອນ, ເຄື່ອນດ້ວຍຄວາມໄວຄົງທີ່ ຫຼື ຢຸດເຄື່ອນ, ແລະ ພາກສ່ວນທີ່ເປັນໄລຍະເວລາເຫຼົ່ານີ້ກໍອາດຈະມີການປ່ຽນແປງຂອງພາກສ່ວນທີ່ເປັນໄລຍະເວລາດ້ວຍ. ສິ່ງນີ້ເຮັດໃຫ້ມີຄວາມຕ້ອງການທີ່ສູງຂຶ້ນຕໍ່ຕົວຄວບຄຸມ.
 ຂ່າວຮ້ອນ
ຂ່າວຮ້ອນ2026-06-01
2026-03-24
2026-03-20
2026-03-03
2026-03-02
2026-03-01
ລິขະສິດ © 2025 ໂດຍ Delixi New Energy Technology (hangzhou) Co., Ltd. - ນະໂຍບາຍຄວາມເປັນສ່ວນຕົວ