الارتداد المنخفض جدًّا يلغي أخطاء التموضع
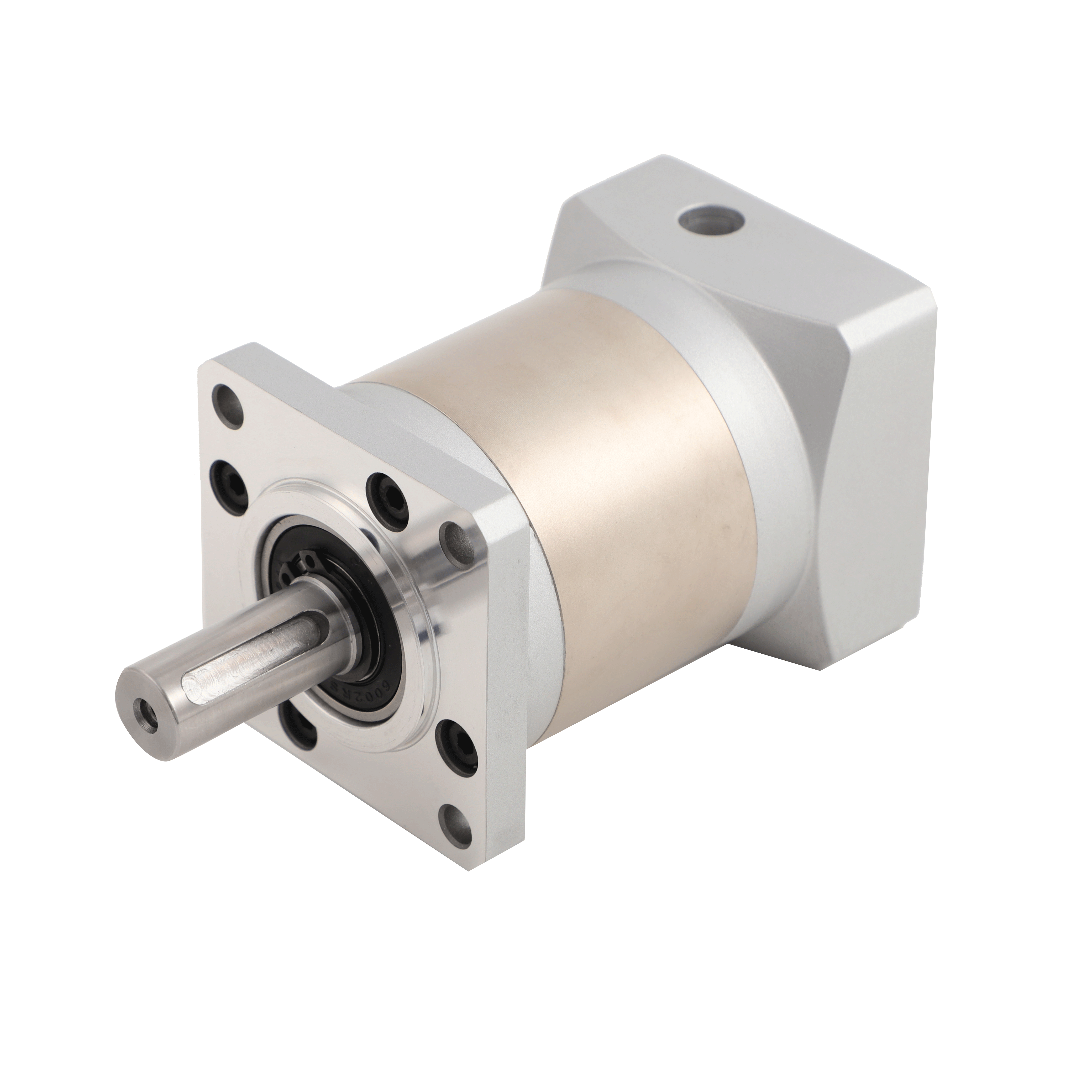
تُعَدّ علب التروس الخاصة بالذراع الروبوتية حجر الزاوية في الحركة الدقيقة، وتصميمها ذي الانزياح الزاوي المنخفض جدًّا هو السبب الرئيسي الذي يجعلها تحقِّق دقةً متناهيةً في التوجيه — وهي دقةٌ شاهدتُ بعيني كيف غيَّرتْ مئات التطبيقات الصناعية على مدى عقدٍ من الزمن في مجال الأتمتة. فعلى سبيل المثال، واجه عميلٌ متخصصٌ في قطاع الإلكترونيات (3C) صعوباتٍ جمّةً في تجميع منتجاته بسبب عيوبٍ ناجمةٍ عن استخدام علب تروس قديمة كانت تنطوي على انزياح زاوي قدره ٣٠ دقيقة قوسية، ما أدّى إلى عدم انتظام حركات الذراع الروبوتية. وباستبدالنا تلك العلب بعلب تروسنا عالية الدقة الخاصة بالذراع الروبوتية، والتي تتميّز بانزياح زاوي لا يتجاوز ١٥ دقيقة قوسية (بل ولا يتجاوز ٢٠ دقيقة قوسية في طرازنا المتوافق مع محركات السيرفو بقطر ٤٢ مم)، تحوّل الأداء تحولًا جذريًّا: فقد انخفض معدل الأخطاء في عملية التجميع بنسبة ٨٠٪، وتحقّقت حركةٌ دقيقةٌ ثابتةٌ للذراع الروبوتية حتى أثناء المهام المتكررة ذات السرعة العالية. ويؤكِّد خبراء هندسة الأتمتة أن أي انزياح زاوي يفوق ٢٠ دقيقة قوسية يؤدي إلى تدمير الدقة، لأن الانحرافات الطفيفة تتراكم مع كل حركة. وتُصنَع علب تروس الذراع الروبوتية لدينا باستخدام تروس مصوَّبة بدقةٍ عاليةٍ وخاضعةٍ لضوابط جودةٍ صارمةٍ، ومدعومةٍ بشهادة الاعتماد الدولية IATF 16949، مما يضمن أدنى درجة ممكنة من الحركة غير المرغوب فيها بين المكونات. سواءً أكانت علبة تروس زاوية قائمة مخصصة للمساحات الضيقة، أو كانت علبة تروس كوكبية مصمَّمة لتحمل الأحمال الثقيلة، فإن هذا الانزياح الزاوي المنخفض جدًّا يضمن أن الذراع الروبوتية تتحرّك تمامًا وفق البرمجة المُدخلة — وهو أمرٌ بالغ الأهمية في مهام مثل التجميع الميكروسكوبي واللحام الدقيق.
كثافة عزم الدوران العالية تُمكّن من الحركة السلسة والخاضعة للتحكم
الحركة الدقيقة ليست مسألة دقة فحسب، بل تتعلق أيضًا بالسلاسة والتحكم في الحركة، وتوفّر علب التروس الخاصة بأذرع الروبوتات هذه الميزة من خلال كثافة عزم دوران استثنائية توازن بين القوة والدقة. وقد عملتُ مع مصنعٍ لقطع غيار السيارات كانت أذرع الروبوتات فيه تواجه صعوبات في التعامل مع المكونات الثقيلة دون حركات متقطعة، ما تسبب في تلف الأسطح. ولذلك، قمنا بتثبيت علبة تروس ذراع روبوتية تعمل بجهد ٢٤ فولت، وعزم دوران اسمي يبلغ ٤٠٠ نيوتن·متر، ونسبة تخفيض ٨٦٠,٦:١، وهي مصممة لتوفير عزم دوران قوي ضمن هيكلٍ مدمج. والنتيجة كانت أن أذرع الروبوتات رفعت ووضعت أجزاءً وزنها ٢٠ كجم بسلاسة تامة، دون انطلاقات أو توقفات مفاجئة، كما اختفى تلف المكونات تمامًا. ويلاحظ خبراء هندسة الميكانيكا أن كثافة العزم تُعد عاملاً محوريًّا في تحقيق الدقة؛ إذ تقوم علب تروس أذرع الروبوتات بتوزيع عزم الدوران عبر عدة تروس كوكبية، مما يوفّر قوةً ثابتةً تمنع التجاوز أو التأخر. وتم تصميم علب تروس أذرع الروبوتات لدينا، مثل النموذج الكوكبي عالي الدقة الذي تصل كفاءته إلى ٩٦٪، لتوصيل عزم الدوران بشكل متجانس حتى عند السرعات المنخفضة، مما يضمن تسارعًا وبطئًا سلسين. وهذه الموازنة بين القوة والتحكم تجعلها مثاليةً للتطبيقات المتنوعة، بدءًا من التعامل الدقيق مع المكونات الإلكترونية وانتهاءً بالمهمات الصناعية الثقيلة، ما يثبت أن علب تروس أذرع الروبوتات تُعد عنصرًا جوهريًّا للحفاظ على الدقة في جميع أنواع الحركة.
البناء الصلب يقلل الاهتزاز والانحراف إلى أدنى حد
الاهتزاز والانحراف هما عاملان يُفسدان الدقة، أما التصنيع الصلب لعلب تروس أذرع الروبوتات فهو ما يضمن ثبات هذه الأذرع أثناء الحركة—وهو سببٌ آخر يجعلها لا غنى عنها في العمليات الدقيقة. واجه عميلٌ متخصص في تصنيع البطاريات مشكلةً في تحديد مواقع الإلكترودات بسبب اهتزاز مفرط في أذرع الروبوتات لديه، ناتجٌ عن تصميم علب التروس الهشّة. ولذلك استبدلنا علب التروس القديمة بأخرى من إنتاجنا المخصصة لأذرع الروبوتات، والتي صُنعت باستخدام أغلفة من الفولاذ المُصلب ومكونات داخلية معزَّزة تقلل الاهتزاز بنسبة 60٪. وباتت أذرع الروبوتات الآن تتحرَّك بثباتٍ لا يتزعزع، وتحسَّنت دقة تحديد مواقع الإلكترودات لتصل إلى ±١ ميكرومتر، مما حقَّق المعايير الصارمة للجودة التي يطلبها العميل. ويؤكد خبراء هندسة الهياكل أن الصلابة شرطٌ لا يمكن التنازل عنه لتحقيق الدقة؛ إذ تنحني علب التروس المرنة تحت التحميل، ما يؤدي إلى حركات غير قابلة للتنبؤ. وتخضع علب تروس أذرع الروبوتات الخاصة بنا لاختبارات إجهادٍ صارمة تضمن بقاء شكلها دون تشوه حتى عند الاستخدام المستمر، وهي تمتلك عمرًا افتراضيًّا يبلغ ٢٠٬٠٠٠ ساعة، وتتمثَّل ثقة أكثر من ٥٠٠ شركة مصنِّعة عالمية في هذا الأداء. كما أن هذه الصلابة تعزِّز القدرة على التكرار، أي أن ذراع الروبوت تقوم بنفس الحركة بدقةٍ متطابقة في كل مرة—وهو أمرٌ جوهريٌّ في الإنتاج الضخم حيث يُشكِّل الاتساق العامل الأهم.
كفاءة عالية تضمن أداءً ثابتًا على مر الزمن
تتطلب الحركة الدقيقة أداءً ثابتًا، وتضمن كفاءة علب التروس الخاصة بأذرع الروبوت العالية أن لا تفقد هذه الأذرع طاقتها أو دقتها خلال التشغيل المطوّل. ولاحظ عميلٌ متخصص في تصنيع الألواح الشمسية أن دقة أذرع الروبوت لديه بدأت تتراجع بعد ٨ ساعات من التشغيل المتواصل، وذلك بسبب عدم كفاءة علب التروس التي تبدّد الطاقة على شكل حرارة. ولذلك قمنا بترقية هذه العلب إلى علب تروس أذرع الروبوت الخاصة بنا، والتي تبلغ كفاءتها ٩٤–٩٦٪، ما يقلل إلى أدنى حدٍ فقدان الطاقة وتراكم الحرارة. وكانت النتيجة مذهلة: فقد حافظت أذرع الروبوت على دقتها الكاملة طوال نوبات العمل التي تمتد ٢٤ ساعة، كما انخفض استهلاك الطاقة بنسبة ١٥٪. ويُشير خبراء كفاءة الطاقة إلى أن علب التروس غير الكفؤة تعاني من التمدد الحراري، الذي يؤدي إلى تشويه المكونات وفقدان الدقة. وقد صُمّمت علب تروس أذرع الروبوت الخاصة بنا بأسنان تروس مُحسَّنة للإدخال، وبهياكل مُصممة لتبديد الحرارة، بالإضافة إلى مواد معتمدة وفق معيار ISO 9001 مقاومة للتشوه الحراري. سواء أُدمجت هذه العلب داخل محرك تروس كوكبي أو استُخدمت بشكل منفصل، فإن هذه الكفاءة العالية تضمن أداءً موثوقًا لعلبة تروس ذراع الروبوت، نوبةً تلو الأخرى — وهي ميزة بالغة الأهمية للصناعات التي تتطلب إنتاجًا مستمرًا على مدار الساعة.
التكامل السلس مع أنظمة التحكم يعزز الدقة
لا تعمل علب تروس الذراع الروبوتية بشكل منعزل—بل يُعَدُّ قدرتها على الاندماج بسلاسة مع أنظمة التحكم في الأتمتة عاملاً رئيسياً آخر في تحقيق الحركة الدقيقة. وعملتُ مع مصنعٍ واجه صعوباتٍ في التأخيرات التصاعدية في الاتصال بين أذرعه الروبوتية وبرمجيات التحكم، ما أدّى إلى حركاتٍ متقطِّعة وغير دقيقة. وقد تم تصميم علب تروس أذرعنا الروبوتية لتتوافق مع أنظمة التحكم عبر إيثري كات (EtherCat) وأنظمة التحكم التناظرية (مثل زوج محركات السيرفو من الفئة IE4)، فاندمجت بسلاسة تامة مع تركيبتهم. وانخفض التأخير في الاتصال إلى ما يقارب الصفر، واستجابت الأذرع الروبوتية فوراً لأوامر البرمجيات، مع حركاتٍ مُزامَنة بدقة تصل إلى جزء من الملي ثانية. ويؤكد خبراء أنظمة الأتمتة أن ضعف الاندماج يولِّد زمن انتظار (Latency)، ما يُفسد الدقة في المهام الديناميكية. وتدعم علب تروس أذرعنا الروبوتية التخصيص حسب طلبات الشركات المصنِّعة الأصلية (OEM) أو شركات التصنيع حسب الطلب (ODM)، مما يمكننا من تكييف واجهات الاتصال لتناسب أنظمة التحكم المحددة، سواء كانت تركيبة محركات خطوية أو شبكة معقدة للأجهزة الصناعية المتصلة بالإنترنت (Industrial IoT). وبفضل خدماتنا الشاملة التي تشمل تحليل الاحتياجات والدعم ما بعد البيع، يضمن هذا الاندماج السلس أن تعمل علبة تروس الذراع الروبوتية في تناغم تام مع نظام الأتمتة بأكمله. وفي التطبيقات الحرجة من حيث الدقة—مثل قطع الليزر والطباعة ثلاثية الأبعاد—يُحقِّق هذا التكامل التآزري ما يحوِّل الحركات المبرمَجة إلى نتائج مثالية في العالم الحقيقي.