بازخورد بسیار کم، خطاهای موقعیتیابی را از بین میبرد
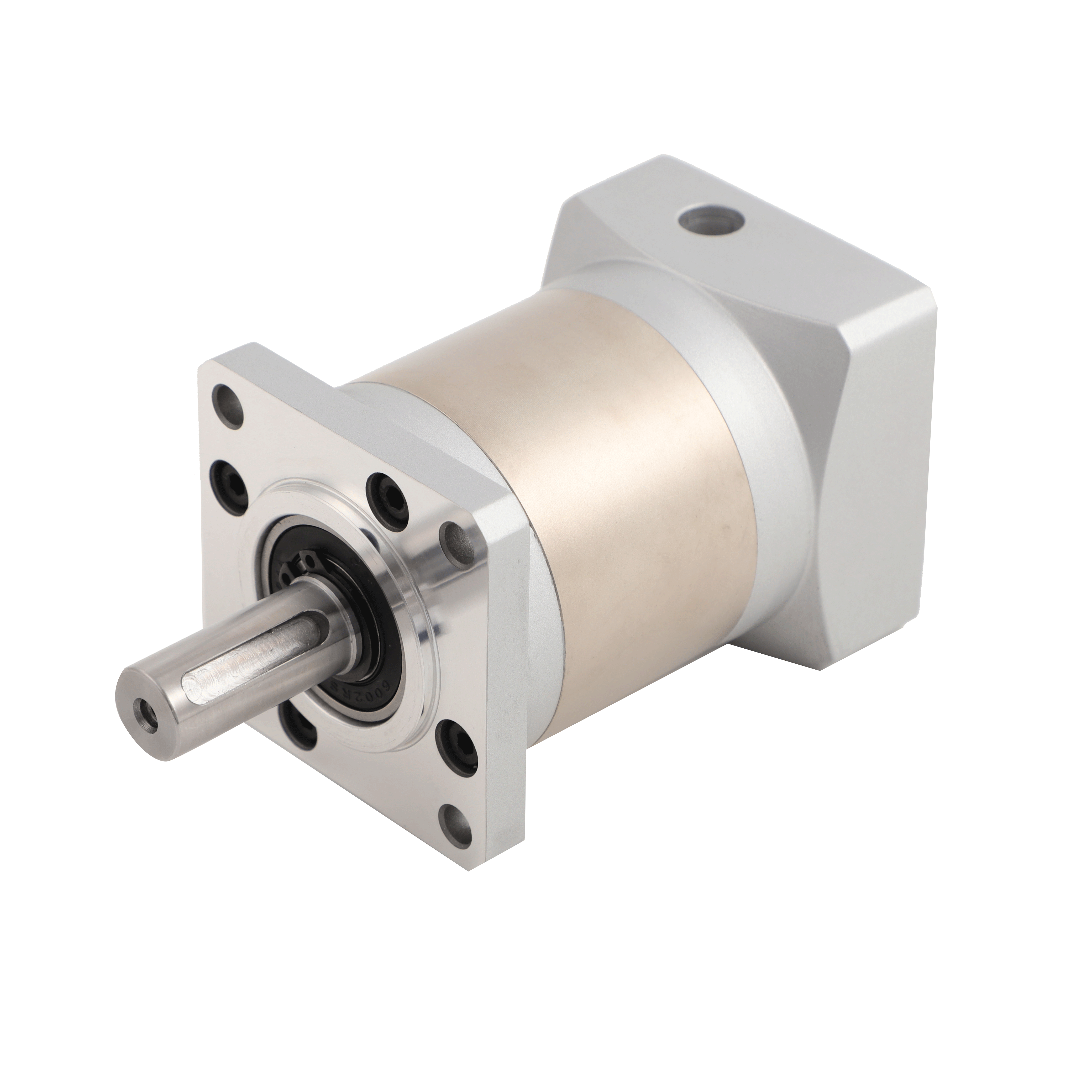
گیربکسهای بازوی ربات، ستون فقرات حرکت دقیق هستند و طراحی اُلترا کمبَکلَش آنها دلیل اصلی ارائه دقت بسیار بالا است—چیزی که در طول ده سال تجربهام در حوزه اتوماسیون، تحول بسیاری از کاربردهای صنعتی را بهصورت عینی مشاهده کردهام. یکی از مشتریان ما در صنعت الکترونیک (۳C) قبلاً با مشکلات مربوط به مونتاژ ناقص محصولات دستوپا میزد، زیرا گیربکسهای قدیمی آنها دارای بَکلَش ۳۰ دقیقه قوس بود که منجر به عدم تراز شدن حرکات بازوی ربات میشد. ما این گیربکسها را با گیربکس بازوی ربات با دقت بالای خود جایگزین کردیم که بَکلَشی معادل ≤۱۵ دقیقه قوس دارد (و حتی برای مدل سازگانپذیر با سرووموتور ۴۲ میلیمتری، این مقدار ≤۲۰ دقیقه قوس است). تفاوت بهطور چشمگیری آشکار بود: نرخ خطای مونتاژ آنها ۸۰ درصد کاهش یافت و بازوی رباتها حتی در وظایف تکراری با سرعت بالا نیز با دقت ثابتی حرکت کردند. کارشناسان مهندسی اتوماسیون تأیید میکنند که بَکلَش بیش از ۲۰ دقیقه قوس، دقت را از بین میبرد، زیرا انحرافات جزئی در هر حرکت تجمعی میشوند. گیربکسهای بازوی ربات ما با چرخدندههایی که با دقت بالا ماشینکاری شدهاند و تحت کنترل کیفیت سختگیرانهای تولید میشوند، و با گواهینامه IATF 16949 پشتیبانی میشوند تا بازی بین اجزا به حداقل برسد. چه گیربکس بازوی ربات زاویهدار برای فضاهای محدود باشد و چه نوع سیارهای برای بارهای سنگین، این بَکلَش اُلترا کم تضمین میکند که بازوی ربات دقیقاً همانگونه که در برنامهریزی شده حرکت کند—که این امر برای وظایفی مانند مونتاژ میکرو و جوشکاری دقیق حیاتی است.
چگالی گشتاور بالا امکان حرکتی نرم و کنترلشده را فراهم میکند
حرکت دقیق تنها به معنای دقت نیست— بلکه شامل حرکتی نرم و کنترلشده نیز میباشد، و گیربکسهای بازوی ربات این ویژگی را از طریق چگالی گشتاور استثنایی فراهم میکنند که توان و ظرافت را در تعادل قرار میدهد. من با یک کارخانهٔ قطعات خودرو همکاری داشتم که در آن بازوی رباتها برای جابجایی اجزای سنگین با حرکات لرزان و نامنظم دچار مشکل میشدند و این امر باعث آسیب به سطح قطعات میگردید. ما گیربکس بازوی ربات ۲۴ ولتی خود با گشتاور اسمی ۴۰۰ نیوتنمتر و نسبت تبدیل ۶/۸۶۰:۱ را نصب کردیم که گشتاور قدرتمندی را در یک طراحی فشرده جای داده است. نتیجه این بود که بازوی رباتها قطعات ۲۰ کیلوگرمی را بهصورت نرم و بدون شتابگیری یا توقف ناگهانی بلند کرده و در مکان مورد نظر قرار دادند و کاملاً آسیبهای واردشده به قطعات از بین رفت. کارشناسان مهندسی مکانیک تأکید میکنند که چگالی گشتاور عامل کلیدی دقت است— زیرا گیربکسهای بازوی ربات گشتاور را بین چندین چرخدنده سیارهای توزیع میکنند و نیرویی یکنواخت ایجاد مینمایند که از فراتر رفتن از نقطهٔ هدف یا تأخیر در پاسخ جلوگیری میکند. گیربکسهای بازوی ربات ما، از جمله مدل سیارهای با دقت بالا با بازدهی ۹۶٪، بهگونهای طراحی شدهاند که گشتاور را حتی در سرعتهای پایین نیز بهطور یکنواخت منتقل کنند و شتابگیری و توقف نرم را تضمین نمایند. این تعادل بین توان و کنترل، آنها را برای کاربردهایی از جمله جابجایی ظریف قطعات الکترونیکی تا وظایف صنعتی سنگین ایدهآل میسازد و ثابت میکند که گیربکسهای بازوی ربات برای حفظ دقت در تمام انواع حرکت حیاتی هستند.
ساختار سفت و محکم، ارتعاش و انحراف را به حداقل میرساند
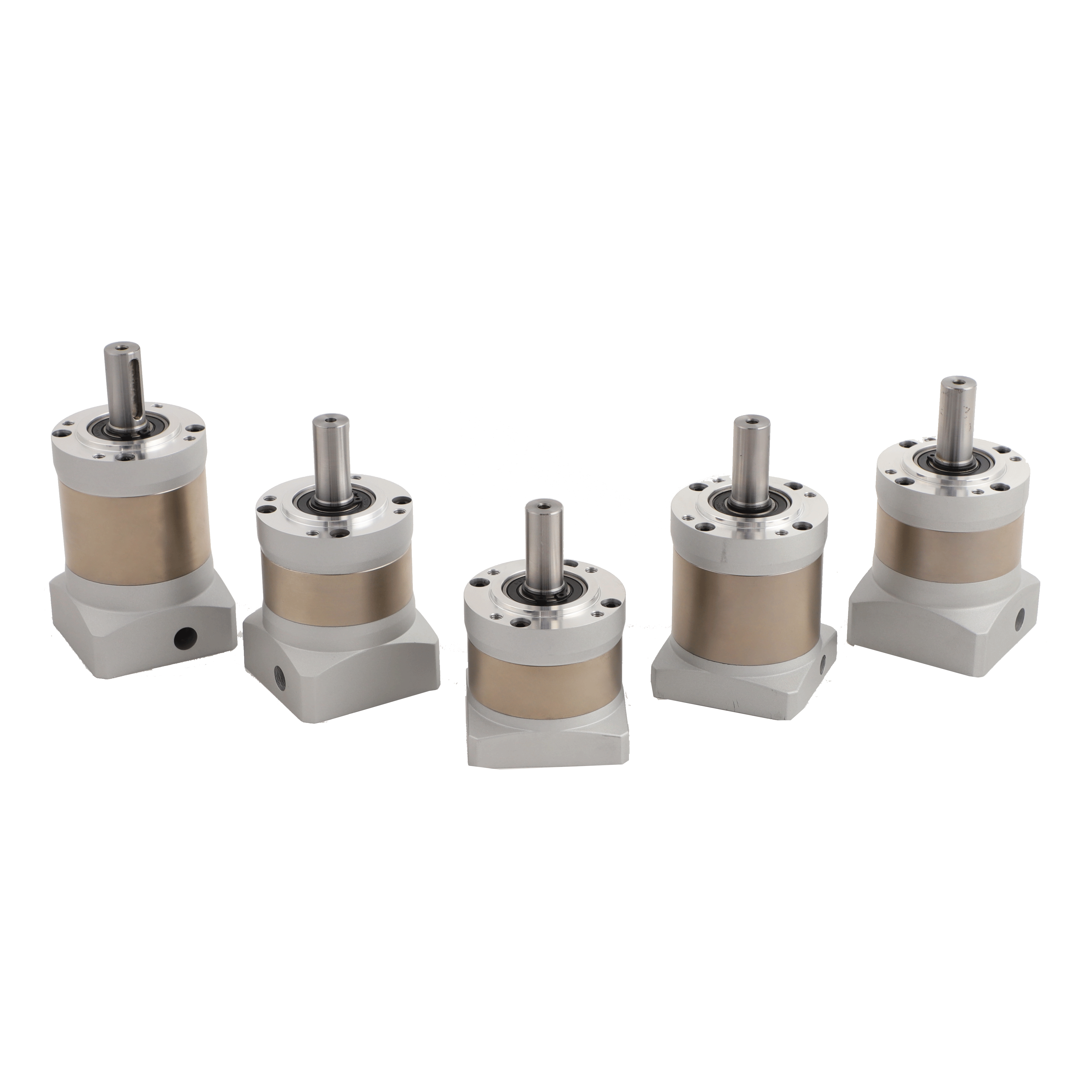
ارتعاش و خیز، عوامل از بین رفتن دقت هستند و ساختار صلب جعبهدندههای بازوی ربات، عامل ثبات بازوی ربات در حین حرکت است—دلیل دیگری که این جعبهدندهها برای انجام عملیات دقیق ضروریاند. یک مشتری تولید باتری با مشکل قرارگیری الکترود مواجه شده بود، زیرا بازوی ربات آنها بهطور بیش از حد ارتعاش میکرد که علت آن ساختار شکنندهٔ جعبهدندهها بود. ما جعبهدندههای بازوی ربات آنها را با جعبهدندههای بازوی ربات خود جایگزین کردیم که از پوستههای فولادی سختشده و اجزای داخلی تقویتشدهای ساخته شدهاند و ارتعاش را تا ۶۰٪ کاهش میدهند. اکنون بازوی ربات با ثباتی محکم و غیرقابل تزلزل حرکت میکند و دقت قرارگیری الکترود به ±۱ میکرومتر رسیده است که این امر استانداردهای سختگیرانهٔ کیفی آنها را برآورده میسازد. کارشناسان مهندسی سازه تأکید میکنند که صلبیت برای دستیابی به دقت غیرقابل چانهزنی است؛ زیرا جعبهدندههای انعطافپذیر تحت بار خم میشوند و منجر به حرکتی غیرقابل پیشبینی میگردند. جعبهدندههای بازوی ربات ما تحت آزمونهای استرس شدید قرار میگیرند تا اطمینان حاصل شود که حتی در شرایط استفادهٔ مداوم نیز شکل خود را حفظ میکنند و عمر مفیدی معادل ۲۰٬۰۰۰ ساعت دارند که توسط بیش از ۵۰۰ تولیدکنندهٔ جهانی مورد اعتماد قرار گرفته است. این صلبیت همچنین تکرارپذیری را نیز بهبود میبخشد، یعنی بازوی ربات هر بار حرکت یکسانی را با دقت یکسانی انجام میدهد—که این ویژگی برای تولید انبوه که در آن ثبات و یکنواختی اهمیت اساسی دارد، ضروری است.
کارایی بالا اطمینانبخش عملکرد پایدار در طول زمان است
حرکت دقیق نیازمند عملکرد پایدار است و بازده بالای جعبهدندههای بازوی ربات اطمینان میدهد که در طول کاربرد طولانیمدت، توان یا دقت آنها کاهش نیابد. یک مشتری تولیدکنندهٔ پنلهای خورشیدی متوجه شد که دقت بازوی رباتهایش پس از ۸ ساعت کار مداوم کاهش یافته است، زیرا جعبهدندههای ناکارآمد انرژی را بهصورت گرما هدر میدادند. ما این جعبهدندهها را با جعبهدندهٔ بازوی ربات ما که بازدهی ۹۴ تا ۹۶ درصدی دارد جایگزین کردیم؛ این جعبهدنده اتلاف انرژی و تجمع گرما را به حداقل میرساند. بهبود حاصل چشمگیر بود: بازوی رباتها در شیفتهای ۲۴ ساعته دقت کامل خود را حفظ کردند و مصرف انرژی ۱۵ درصد کاهش یافت. کارشناسان کارایی انرژی تأکید میکنند که جعبهدندههای ناکارآمد دچار انبساط حرارتی میشوند که منجر به تغییر شکل قطعات و از بین رفتن دقت میگردد. جعبهدندههای بازوی ربات ما با طراحی از دندانهبندی بهینهشدهٔ چرخدندهها و ساختارهای پراکندهکنندهٔ گرما، همراه با موادی که دارای گواهینامهٔ ISO 9001 هستند و در برابر تغییر شکل حرارتی مقاوماند، ساخته شدهاند. چه این جعبهدنده در یک موتور چرخدندهای سیارهای ادغام شود یا بهصورت جداگانه استفاده شود، این بازده بالا اطمینان میدهد که جعبهدندهٔ بازوی ربات بهطور قابل اعتمادی در هر شیفت عمل کند — ویژگیای حیاتی برای صنایعی که نیازمند تولید غیرمقطع و ۲۴ ساعته هستند.
ادغام بیدرز با سیستمهای کنترل، دقت را افزایش میدهد
گیربکسهای بازوی رباتی بهتنهایی کار نمیکنند—توانایی آنها در ادغام بیدرز با سیستمهای کنترل اتوماسیون، عامل کلیدی دیگری برای ارائه حرکت دقیق است. من با کارخانهای همکاری کردم که با تأخیر در ارتباط بین بازوی رباتهایشان و نرمافزار کنترل مواجه بود و این امر منجر به حرکات کند و غیردقیق میشد. گیربکسهای بازوی ربات ما، که با توجه به سازگاری با سیستمهای کنترل اترنت (EtherCat) و آنالوگ (مانند جفتشدن موتور سرووی IE4 ما) طراحی شدهاند، بهطور کامل با سیستم موجود آنها همگامسازی شدند. تأخیر ارتباطی به نزدیک صفر کاهش یافت و بازوی رباتها فوراً به دستورات نرمافزاری پاسخ دادند، بهگونهای که حرکات با دقت میلیثانیهای هماهنگ شدند. کارشناسان سیستمهای اتوماسیون تأیید میکنند که ادغام ضعیف، تأخیر (لاتنسی) ایجاد میکند که در وظایف پویا، دقت را از بین میبرد. گیربکسهای بازوی ربات ما از سفارشیسازی OEM/ODM پشتیبانی میکنند و این امکان را فراهم میآورند که رابطهای اتصال را متناسب با سیستمهای کنترل خاص—چه در تنظیمات موتور گامزن (استپر) و چه در شبکههای پیچیده اینترنت اشیا صنعتی (IIoT)—سفارشیسازی کنیم. با پشتیبانی جامع ما از یکجا—از تحلیل نیاز تا پس از فروش—این ادغام بیدرز تضمین میکند که گیربکس بازوی ربات بهصورت هماهنگ با کل اکوسیستم اتوماسیون عمل کند. برای کاربردهای حساس به دقت مانند برش لیزری و چاپ سهبعدی، این همزیستی همان چیزی است که حرکات برنامهریزیشده را به نتایج بینقص در دنیای واقعی تبدیل میکند.