超低バックラッシュにより位置決め誤差が解消されます
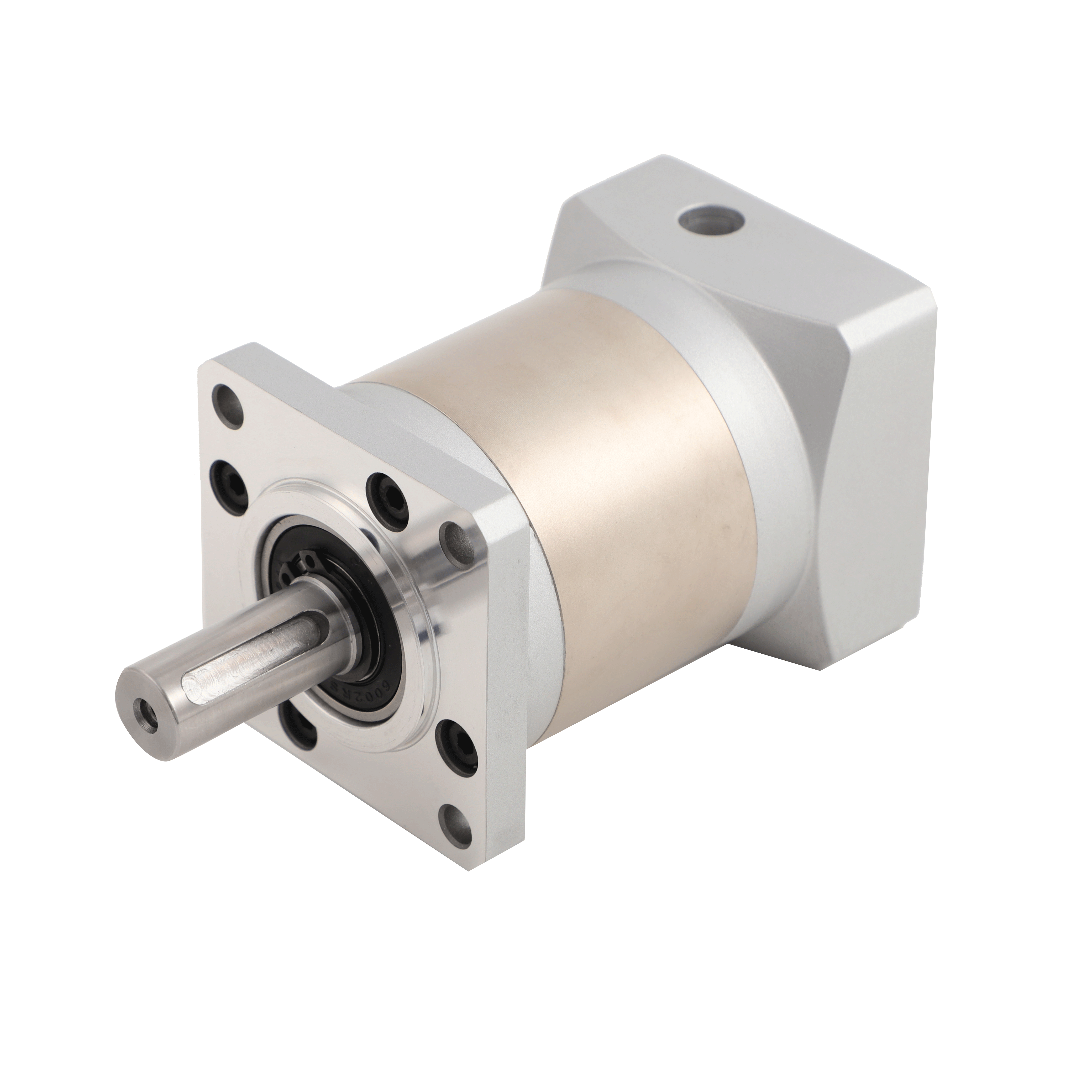
ロボットアーム用ギアボックスは、高精度な動きの基盤であり、その超低バックラッシュ設計が、正確無比な位置決めを実現する主な理由です。私は自動化分野で10年以上にわたりこの技術を現場で目にしてきました。ある3C(コンピュータ・通信・家電)電子機器メーカーの顧客は、従来のギアボックスのバックラッシュが30アーコミニッツであったため、ロボットアームの動きにズレが生じ、製品の組立不良に悩まされていました。当社の高精度ロボットアーム用ギアボックス(バックラッシュ≤15アーコミニッツ)に交換したところ、状況は一変しました。42mmサーボモータ対応モデルでもバックラッシュは≤20アーコミニッツと、業界トップクラスの性能を実現しています。その結果、組立工程の不良率は80%も低下し、高速かつ反復的な作業においても、ロボットアームは一貫して高精度な動作を維持できるようになりました。自動化エンジニアリングの専門家によれば、バックラッシュが20アーコミニッツを超えると、微小な誤差が各動作ごとに累積し、精度が著しく損なわれると確認されています。当社のロボットアーム用ギアボックスは、高精度に機械加工されたギアと厳格な品質管理によって製造されており、IATF 16949認証も取得済みで、部品間の遊び(バックラッシュ)を最小限に抑えています。狭い空間に設置するための直角型ロボットアーム用ギアボックスであれ、重負荷用途向けのプランетリーギアボックスであれ、この超低バックラッシュ性能により、ロボットアームはプログラム通りに正確に動作します。これは、マイクロアセンブリや高精度溶接といった要求の厳しい作業にとって極めて重要です。
高トルク密度により、滑らかで制御された動作を実現
高精度な動きとは、単に正確さを意味するだけではなく、滑らかで制御された運動も含みます。ロボットアーム用ギアボックスは、この要求を満たすために、パワーと繊細さのバランスを実現する優れたトルク密度を提供します。私は自動車部品工場と共同で作業した際、ロボットアームが重い部品を扱う際にカクつき動作を起こし、表面に傷を付けていた問題に直面しました。そこで、当社の24Vロボットアーム用ギアボックス(定格トルク400Nm、減速比860.6:1)を導入しました。これは強力なトルクをコンパクトな設計に凝縮したものであり、その結果、ロボットアームは20kgの部品をスムーズに持ち上げ・位置決めできるようになり、急な始動や停止が一切なくなり、部品への損傷は完全に解消されました。機械工学の専門家によると、トルク密度は高精度動作の鍵となる要素であり、ロボットアーム用ギアボックスは複数のプラネットギアにトルクを分散させることで、オーバーシュートや遅れを防ぐ一貫した力を提供します。当社のロボットアーム用ギアボックス(例:効率96%の高精度プランетラリーギアボックスなど)は、低速時においてもトルクを均等に伝達するよう設計されており、滑らかな加速および減速を保証します。このようなパワーと制御性の調和により、精密な電子部品の取扱いから頑丈な産業用作業まで、幅広い用途に最適です。つまり、あらゆる種類の動きにおいて精度を維持する上で、ロボットアーム用ギアボックスは不可欠な存在であることを示しています。
剛性構造により振動およびたわみを最小限に抑える
振動とたわみは、精度を損なう最大の要因です。ロボットアーム用ギアボックスの剛性の高い構造は、ロボットアームが動作中に安定した状態を保つために不可欠であり、正確な作業を実現する上でまた一つ重要な理由となります。あるバッテリー製造メーカーの顧客は、電極の配置精度に問題を抱えていました。その原因は、ロボットアームの過度な振動であり、これは従来のギアボックス構造が十分に頑丈でなかったためでした。当社は、硬化鋼製ハウジングと補強された内部部品を採用したロボットアーム用ギアボックスに交換しました。これにより振動を60%低減でき、ロボットアームは岩のように安定した動きを実現しました。その結果、電極配置の精度は±1μmまで向上し、顧客が求める厳しい品質基準を満たすようになりました。構造工学の専門家は、高精度を実現するには剛性が絶対不可欠であると指摘しています。柔軟性の高いギアボックスは負荷下で変形し、予測不能な動きを引き起こします。当社のロボットアーム用ギアボックスは、連続使用下でも形状を維持できるよう、厳格な応力試験を経ています。また、20,000時間の寿命を有し、世界中の500社以上のメーカーから信頼されています。この剛性は再現性の向上にも寄与し、ロボットアームは同一の動きを毎回まったく同じ精度で実行できます。これは、一貫性が何よりも重視される量産工程において極めて重要です。
高効率により、長期間にわたって一貫した性能を確保
高精度な動作には一貫した性能が不可欠であり、ロボットアーム用ギアボックスの高い効率性は、長時間の連続運転においても出力や精度を損なわないことを保証します。太陽光パネル製造メーカーの顧客は、非効率なギアボックスによりエネルギーが熱として浪費され、ロボットアームの精度が8時間の連続稼働後に低下することに気づきました。当社は、効率94~96%のロボットアーム用ギアボックスへとアップグレードし、エネルギー損失および発熱を最小限に抑えました。その効果は顕著で、ロボットアームは24時間連続稼働でも完全な精度を維持できるようになり、エネルギー消費量は15%削減されました。エネルギー効率の専門家によると、非効率なギアボックスは熱膨張を引き起こし、部品の変形を招き、結果として精度が損なわれます。当社のロボットアーム用ギアボックスは、最適化された歯車噛み合わせと放熱構造を備えており、さらにISO 9001認証済みの熱変形に強い素材を採用しています。遊星ギアモーターに組み込まれる場合でも、単体で使用される場合でも、この高い効率性により、ロボットアーム用ギアボックスはシフトごとに信頼性の高い性能を発揮します。これは、24時間365日稼働を要する産業にとって極めて重要です。
制御システムとのシームレスな統合により、精度が向上
ロボットアーム用ギアボックスは単体で機能するものではなく、自動化制御システムとのシームレスな統合能力が、高精度な動作を実現するもう一つの鍵となる要素です。私は、ロボットアームと制御ソフトウェア間の通信遅延に悩んでいた工場と協力し、もたつきや不正確な動作を解消しました。当社のロボットアーム用ギアボックスは、EtherCATおよびアナログ制御システム(例:IE4サーボモータとの組み合わせ)との互換性を念頭に設計されており、顧客の既存設備と完璧に同期しました。通信遅延はほぼゼロまで低減され、ロボットアームはソフトウェアからの指令に即座に応答し、動作はミリ秒単位の精度で指令通りに実行されるようになりました。自動化システムの専門家によれば、統合性の不足はレイテンシを引き起こし、動的タスクにおける精度を著しく損なうとのことです。当社のロボットアーム用ギアボックスはOEM/ODMカスタマイズに対応しており、ステッパーモータ構成から複雑な産業用IoTネットワークに至るまで、特定の制御システムに合わせて接続インターフェースを最適化することが可能です。ニーズ分析からアフターサポートに至るまでのワンストップサービス体制を背景に、このシームレスな統合により、ロボットアーム用ギアボックスは自動化エコシステム全体と調和して動作します。レーザー切断や3Dプリンティングなど、精度が極めて重要なアプリケーションにおいて、このような連携こそが、プログラムされた動作を現実世界での完璧な結果へと変える原動力となります。