Ultra-Minimus Retrogressus Eradicit Errores Positionis
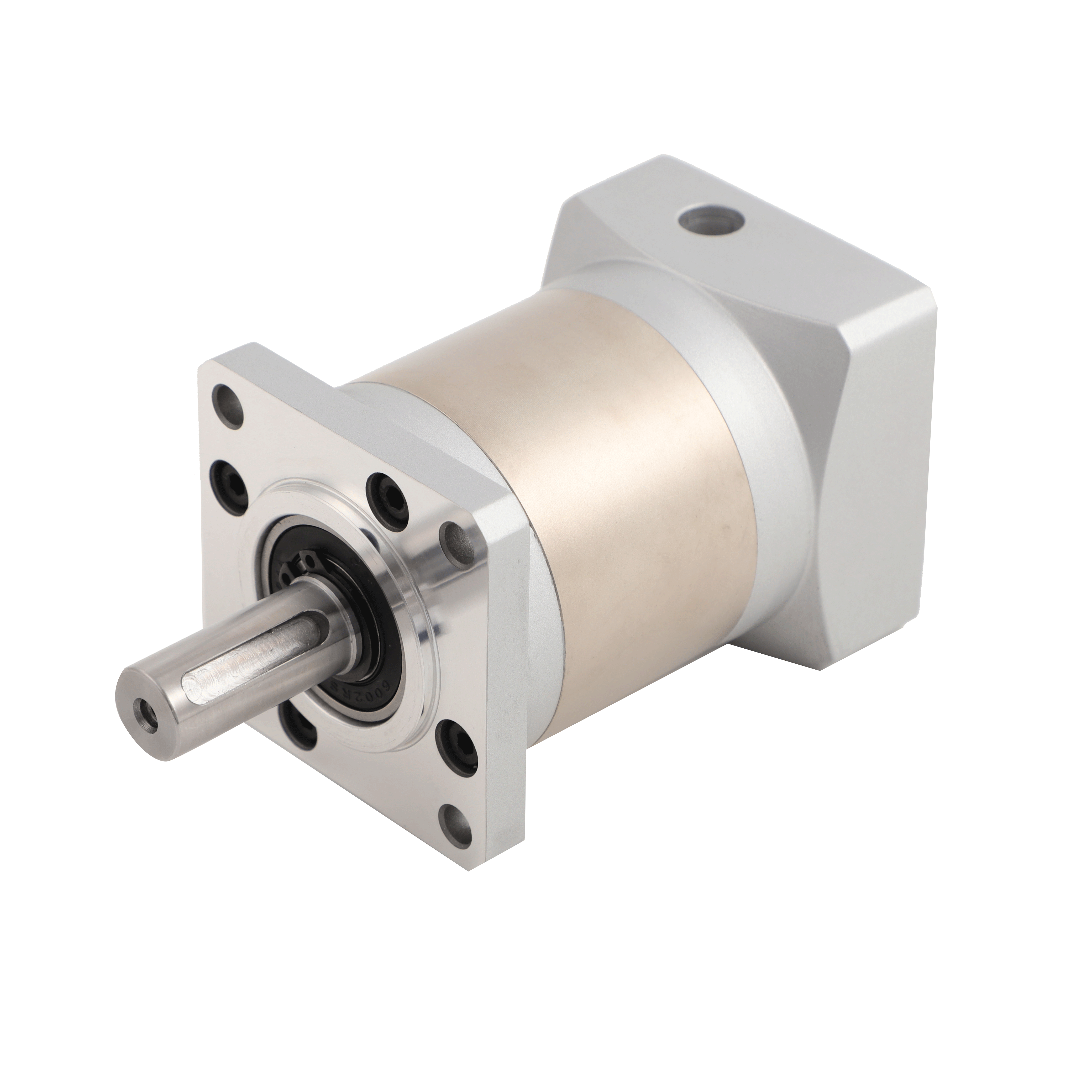
Cistellae denticulatae bracchiorum roboticorum sunt fundamentum motus praecisi, et eorum structura ultra-parvae retroactionis est causa principalis qua accuratissimam praecisionem praebent—quod ego ipse per decennium in automatione innumerabilibus applicationibus industrialibus videre potui. Aliquando cliens in arte electronica 3C laborabat cum defectuosa confectione productorum, quia cistellae denticulatae veteres eius 30 arcuminuta retroactionis habebant, quae ad dislocationem motuum bracchiorum roboticorum ducebant. Nos eas substituimus cistella denticulata nostra altae praecisionis pro brachiis roboticis, quae retroactionem ≤15 arcuminutorum habet (et etiam ≤20 arcuminuta pro nostro modello 42 MM servo-compatibili). Differentia erat ut inter diem et noctem: ratio errorum confectionis eorum decrescit 80 %, et brachia robotica motus constantem praecisionem retinuerunt, etiam in operibus repetitivis alti velocitatis. Periti in ingeniaria automationis confirmant retroactionem supra 20 arcuminuta praecisionem destruere, quia minima deviatio in singulis motibus accumulatur. Cistellae denticulatae nostrae pro brachiis roboticis ex denticulis praecise tornatis fabricantur et rigida inspectione qualitatis subtestantur, certificatio IATF 16949 nos iuvat, ut lusus inter partes minimus sit. Sive cistella denticulata anguli recti pro spatiis angustis sive varians planetaria pro oneribus gravibus, haec ultra-parva retroactio garantit ut brachium roboticum exacte moveatur ut programmatum est—quod est necessarium ad opera ut micro-confectio et praecisa soldatura.
Alta Densitas Momenti Torquentis Permittit Motum Lenem et Regulatum
Motus praecisio non solum de accuratia agit—sed etiam de motu leni et moderato; et cistellae rotarum bracchiorum robotici hanc praebent per egregiam densitatem momenti torquentis, quae vim et subtilitatem aequilibrat. Cum fabrica partium automobilium cooperatus sum, ubi bracchia robotica gravia componentia tractare vix poterant sine motibus concussivis, quae damna in superficie causabant. Cistellam rotarum bracchiorum robotici nostram ad tensionem 24 V, cum momento torquente nominale 400 Nm et cum proportione 860,6:1, instituimus, quae magnam vim momenti torquentis in compagem parvam concludit. Eventus fuit ut bracchia robotica partes 20 kg levarent et collocarent leniter, absque initio aut fine subito, et damna in componentibus prorsus evanuerunt. Periti in ingeniaria mechanica notant densitatem momenti torquentis esse clavem ad praecisionem: cistellae rotarum bracchiorum robotici momentum torquens per plures rotas planetarias distribuunt, quod vim constantem praebet, quae excessum vel retentationem prohibet. Cistellae rotarum bracchiorum robotici nostri, ut exempli gratia modello planetario altae praecisionis, cuius efficentia est 96 %, ita sunt constructae ut momentum torquens aequaliter conferant, etiam ad velocitates lentas, certificantes accelerationem et decelerationem lenem. Haec aequilibratio inter vim et moderationem eas ad usus idoneas reddit, a delicata tractatione electronicorum usque ad arduas functiones industriales, demonstrantes cistellas rotarum bracchiorum robotici esse fundamentales ad servandam praecisionem in omnibus motuum generibus.
Constructio Rigida Vibrations et Deflexiones Minuit
Vibratio et deflectio sunt peritae praecisionis, et structura rigida multiplicatorum bracchiorum robotici est quae bracchia robotica stabilia tenet dum moventur—alia ratio cur haec multiplicatores pro operibus accuratis necessarii sint. Cliens fabricans baterias difficultates habebat in positione electrodorum, quia bracchia robotica eius nimis vibrabant, quod causabatur a structuris multiplicatorum infirmis. Multiplicatores nostros bracchiorum robotici loco eorum substituimus, qui ex aere durato fabricati sunt et internis partibus refortitis, quae vibrationem minuunt ad 60%. Nunc bracchia robotica motum habent stabilem ut saxum, et accuratio positionis electrodorum ad ±1μm emendata est, ita ut severa eorum norma qualitatis impleretur. Periti in ingeniaria structurale affirmant rigiditatem non posse negari pro praecisione: multiplicatores flexibiles sub onere incurvantur, quod ad motum incertum ducit. Multiplicatores nostri bracchiorum robotici rigorosam probationem sub stress subiciuntur, ut certum fiat eos formam suam etiam sub usu continuo servare, cum vita 20 000 horarum quae ab plus quam 500 fabricatoribus universalibus fiduciam habet. Haec etiam rigiditas repetibilitatem augent, id est brachium roboticum eundem motum semper eadem praecisione perficit—quod ad productionem massivam necessarium est, ubi constantia omnia est.
Alta Efficiēntia Certam Per Tempus Performantiam Sustinet
Motus praecisus constantem postulat operationem, et altissima efficacia multiplicatorum bracchiorum robotici efficit ut neque potentia neque praecisio per longam operationem amittantur. Cliens fabricans tabulas solares animadvertit praecisionem bracchiorum robotici suorum post octo horas continuatae operationis decrescere, propter inefficaces multiplicatores qui energiam in calorem absumebant. Nos eos ad nostrum multiplicatorem bracchiorum robotici, cuius efficacia est 94–96 %, perfecimus, quod perditam energiam et accumulationem caloris minuit. Emendatio mirabilis fuit: brachia robotica praecisionem integram per turnos viginti quattuor horarum servaverunt, et consumptio energiae decrescit 15 %. Periti in efficacia energiae ostendunt multiplicatores inefficaces expansionem thermicam pati, quae componentes distorquet et praecisionem corrumpit. Multiplicatores nostri bracchiorum robotici ita sunt constructi ut dentes optime inter se cohaereant et structurae calorem dissipent, simul cum materiis certificatis secundum ISO 9001, quae deformationi thermicae resistunt. Sive in motore denticulato planetario integrati sint sive isolati utantur, haec alta efficacia multiplicatorem bracchiorum robotici fidum reddet, turnus post turnum — quod est necessarium in iis industriae quae productionem per totam diem exigunt.
Integratio Inconspicua cum Systematibus Regulatoriis Praecisionem Augent
Cremallerae bracchiorum robotorum non operantur isolatim—facultas eorum ad integrandum se per omnia cum systematibus automationis et controllo alterum est factor clavis ad praebendum motum praecisum. Ego cooperatus sum cum fabrica quae laborabat de moris communicationis inter bracchia robotorum suorum et software controlis, quod duxit ad motus tardos et imprecisos. Cremallerae nostrae bracchiorum robotorum, designatae ad compatibilitatem cum systematibus EtherCat et analogicis controlis (ut in coniunctione nostra cum motoribus servo IE4), perfecte synchronizatae sunt cum systemate eorum. Morae communicationis diminutae sunt ad valorem prope nullum, et bracchia robotorum statim responderunt ad iussa software, cum motibus ad millisecondum praecise allignatis. Periti systematum automationis confirmant quod mala integratio creat latenciam, quae praecisionem in operibus dynamicis destruit. Cremallerae nostrae bracchiorum robotorum suadent personalisationem OEM/ODM, quae nobis permittit adaptare interfaces connexionis ad systemata controlis specifica, sive ad conformationem motorum passuum sive ad complexam retem industrialem IoT. Fultae a nostro servitio uno—ab analysi postulationum usque ad post-venditionis auxilium—haec integratio perfecta certificat quod cremallera bracchiorum robotorum operetur in harmonia cum toto ecosystēma automationis. Pro applicationibus quae praecisionem exigunt, ut sectio laser et impressio 3D, haec symphonia est quae convertit motus programmatos in effectus realis sine vitio.